TWI - Two Wire Interface
TWI 总线兼容 I2C 总线协议,是一种简单、双向二线制同步串行总线。它只需要两根线即可在连接于总线上的器件之间传送信息。 TWI控制器支持的标准通信速率为100kbps,最高通信速率可以达到400kbps。全志的twi控制器支持以下功能:
- 支持主机模式和从机模式;
- 主机模式下支持dma传输;
- 主机模式下在多个主机的模式下支持总线仲裁;
- 主机模式下支持时钟同步,位和字节等待;
- 从机模式下支持地址检测中断;
- 支持7bit从机地址和10bit从机地址;
- 支持常规的 I2C 协议模式和自定义传输模式。
模块配置
驱动配置
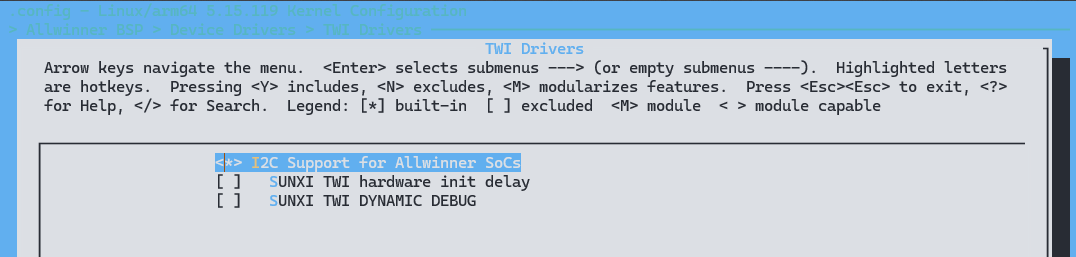
TWI Drivers ->
<*> I2C Support for Allwinner SoCs
[ ] SUNXI TWI hardware init delay
[ ] SUNXI TWI DYNAMIC DEBUG
设备树配置
引脚配置
&pio {
twi0_pins_default: twi0@0 {
pins = "PD22", "PD23";
function = "twi0";
drive-strength = <10>;
bias-pull-up;
};
twi0_pins_sleep: twi0@1 {
pins = "PD22", "PD23";
function = "gpio_in";
};
};
部分平台存在两个域,需要分开配置:
&r_pio {
s_twi0_pins_default: s_twi0@0 {
pins = "PL0", "PL1";
function = "s_twi0";
drive-strength = <10>;
bias-pull-up;
};
s_twi0_pins_sleep: s_twi0@1 {
pins = "PL0", "PL1";
function = "gpio_in";
};
};
TWI 控制器配置
twi0: twi0@2502000 {
#address-cells = <1>;
#size-cells = 小于0>;
compatible = "allwinner,sunxi-twi-v101";
device_type = "twi0";
reg = 小于0x0 0x02502000 0x0 0x400>;
interrupts = <GIC_SPI 10 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&ccu CLK_TWI0>;
clock-names = "bus";
resets = <&ccu RST_BUS_TWI0>;
dmas = <&dma 43>, <&dma 43>;
dma-names = "tx", "rx";
status = "okay";
};
-
twi0: twi0@2502000 {:设备节点名称,twi0是设备的别名,@2502000是设备在内存中的基地址。 -
#address-cells = <1>;:定义设备地址单元的数量。这里是1,表示每个设备地址使用一个单元。 -
#size-cells = 小于0>;:定义设备大小单元的数量。这里是0,表示设备大小不适用或为固定大小。 -
compatible = "allwinner,sunxi-twi-v101";:设备兼容性描述,指定了设备与驱动程序的兼容性。allwinner,sunxi-twi-v101表示该设备兼容Allwinner的Sunxi TWI版本101。 -
device_type = "twi0";:设备类型,表示这是一个TWI设备。 -
reg = 小于0x0 0x02502000 0x0 0x400>;:设备的寄存器地址和大小描述。小于0x0 0x02502000 0x0 0x400>指定了设备的寄存器地址范围,从0x02502000到0x025023FF,大小为0x400字节。 -
interrupts = <GIC_SPI 10 IRQ_TYPE_LEVEL_HIGH>;:设备中断描述,指定了设备使用的中断控制器和中断号,以及中断触发类型。这里使用了GIC(Generic Interrupt Controller)作为中断控制器,中断号为10,触发类型为高电平触发。 -
clocks = <&ccu CLK_TWI0>;:设备时钟描述,指定了设备使用的时钟源。<&ccu CLK_TWI0>表示设备使用了CCU(Clock Control Unit)中的CLK_TWI0时钟源。 -
clock-names = "bus";:设备时钟名称,指定了时钟的功能名称,这里是"bus"。 -
resets = <&ccu RST_BUS_TWI0>;:设备复位描述,指定了设备使用的复位控制。<&ccu RST_BUS_TWI0>表示设备使用了CCU中的RST_BUS_TWI0复位控制。 -
dmas = <&dma 43>, <&dma 43>;:DMA(Direct Memory Access)描述,指定了设备使用的DMA通道。这里指定了两个DMA通道,一个用于传输(tx),一个用于接收(rx)。 -
dma-names = "tx", "rx";:DMA通道名称,指定了DMA通道的功能名称,分别是"tx"和"rx",用于传输和接收。 -
status = "okay";:设备状态,表示设备处于正常工作状态。
为了在TWI总线驱动代码中区分每一个TWI控制器,需要在Device Tree中的aliases节点中为每一个TWI节点指定别名:
aliases {
twi0 = &twi0;
twi1 = &twi1;
twi2 = &twi2;
twi3 = &twi3;
...
};
TWI总线驱动程序通常会将每个TWI控制器都分配一个别名,形式为字符串“twi”加连续编号的数字,例如“twi0”、“twi1”等。这样的别名方便在代码中引用和区分不同的TWI控制器。通过of_alias_get_id()函数可以获取对应TWI控制器的数字编号,然后根据编号来确定具体是哪个TWI控制器,从而进行相应的操作。
板级配置
&twi0 {
clock-frequency = <400000>; /* TWI控制器的时钟频率 */
pinctrl-names = "default", "sleep"; /* 设备使用的pin脚名称 */
pinctrl-0 = <&twi0_pins_default>; /* 设备使用的pin脚配置(default) */
pinctrl-1 = <&twi0_pins_sleep>; /* 设备使用的pin脚配置(sleep) */
twi_drv_used = <1>; /* 是否启用drv模式传输数据:0-engine模式,1-drv模式 */
twi-supply = <®_dcdc1>; /* regulator��相关配置 */
status = "okay"; /* 设备是否使用 */
eeprom@50 { /* eeprom从设备 */
compatible = "atmel,24c16"; /* eeprom从设备对应的设备驱动compatible,用于驱动和设备的绑定 */
reg = 小于0x50>; /* eeprom从设备地址为0x50 */
status = "disabled"; /* eeprom从设备status */
};
};
-
&twi0 { ... };:这是TWI控制器的节点,使用了别名“twi0”。 -
clock-frequency = <400000>;:指定了TWI控制器的时钟频率为400 kHz。 -
pinctrl-names = "default", "sleep";:指定了TWI控制器在不同状态下使用的pin脚配置的名称�,分别为“default”和“sleep”。 -
pinctrl-0 = <&twi0_pins_default>;:指定了TWI控制器在默认状态下使用的pin脚配置,引用了一个名为“twi0_pins_default”的pin脚配置节点。 -
pinctrl-1 = <&twi0_pins_sleep>;:指定了TWI控制器在睡眠状态下使用的pin脚配置,引用了一个名为“twi0_pins_sleep”的pin脚配置节点。 -
twi_drv_used = <1>;:指定了TWI控制器是否启用了drv模式传输数据,这里设置为1表示启用了drv模式。 -
twi-supply = <®_dcdc1>;:指定了TWI控制器使用的电源配置,引用了一个名为“reg_dcdc1”的电源节点。 -
status = "okay";:指定了TWI控制器处于正常工作状态。 -
eeprom@50 { ... };:这是一个EEPROM从设备的节点,使用了别名“eeprom”,地址为0x50。-
compatible = "atmel,24c16";:指定了EEPROM从设备的设备驱动兼容性,这里是Atmel 24C16型号的EEPROM。 -
reg = 小于0x50>;:指定了EEPROM从设备的地址,这里是0x50。 -
status = "disabled";:指定了EEPROM从设备处于禁用状态。
-
工作模式
master 模式
TWI控制器默认工作在master模式,无需其他额外配置。
engine 模式配置
engine是中断模式驱动通信,占用cpu资源,可做slave模式,时钟延展,一般作slave或者slave设备需要时钟延展特性时才使用engine模式
工作在engine模式,主要是配置twi_drv_used = 小于0>属性,TWI模块在dts文件中的具体配置如下:
&twi0 {
clock-frequency = <400000>; /* TWI控制器的时钟频率 */
pinctrl-names = "default", "sleep"; /* 设备使用的pin脚名称 */
pinctrl-0 = <&twi0_pins_default>; /* 设备使用的pin脚配置(default) */
pinctrl-1 = <&twi0_pins_sleep>; /* 设备使用的pin脚配置(sleep) */
twi_drv_used = 小于0>; /* 是否启用drv模式传输数据:0-engine模式 */
no_suspend = <1>; /* 默认为0,无需配置;当pmu依赖twi时需要置1,标识twi在休眠唤醒阶段不休眠 */
status = "okay"; /* 设备是否使用 */
};
drv 模式配置
drv模式对cpu占用低,稳定性高,一般master模式下,默认使用drv模式
工作在drv模式,主要是配置 twi_drv_used = <1> 属性,TWI模块在dts文件中的具体配置如下:
&twi0 {
clock-frequency = <400000>; /* TWI控制器的时钟频率 */
pinctrl-names = "default", "sleep"; /* 设备使用的pin脚名称 */
pinctrl-0 = <&twi0_pins_default>; /* 设备使用的pin脚配置(default) */
pinctrl-1 = <&twi0_pins_sleep>; /* 设备使用的pin脚配置(sleep) */
twi_drv_used = <1>; /* 是否启用drv模式传输数据:1-drv模式 */
no_suspend = <1>; /* 默认为0,无需配置;当pmu依赖twi时需要置1,标识twi在休眠唤醒阶段不休眠 */
status = "okay"; /* 设备是否使用 */
};
传输速率配置
工作在标准模式,时钟频率为100k,配置clock-frequency = <100000>;
工作在快速模式,时钟频率为400k,主要配置clock-frequency = <400000>。
TWI模块在dts文件中的具体配置如下:
&twi0 {
clock-frequency = <400000>;/* TWI控制器的时钟频率,默认为400k */
...
};
slave 模式
TWI控制器支持作为从机使用,但是默认工作在master模式,slave模式需要特殊配置。
内核驱动配置
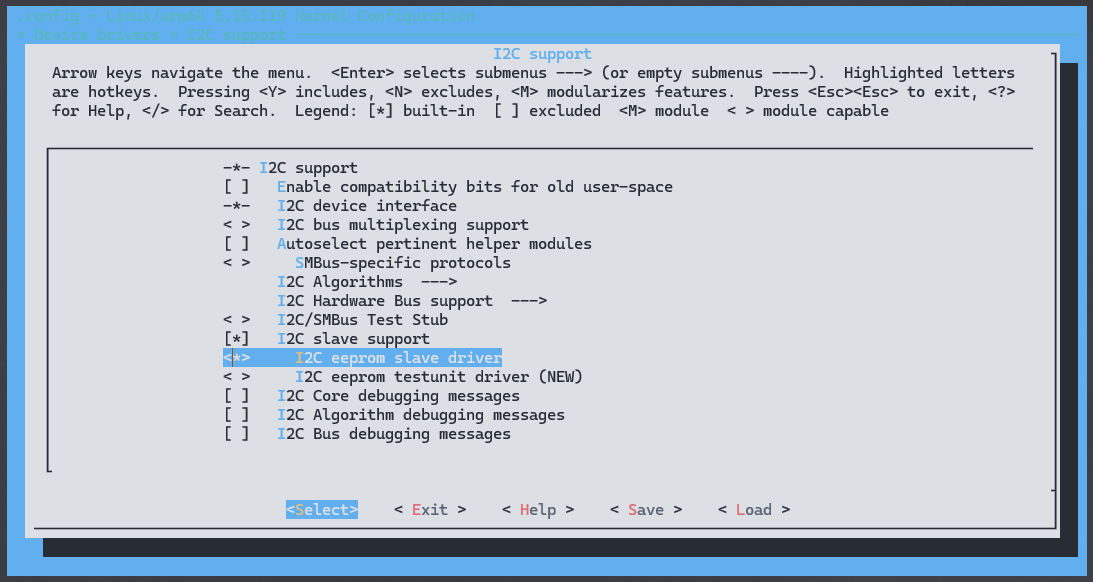
Device Drivers --->
I2C support --->
[*] I2C slave support
<*> I2C eeprom slave driver
slave模式时TWI控制器需要配置为engine模式,并且在dts中注册为slave,具体配置如下:
TWI模块在dts文件中的具体配置如下:
&twi0 {
...
twi_drv_used = 小于0>; /* slave must work in engine-mode */
status = "okay";
slave {
compatible = "slave-24c02"; /* Slave device drivers provided by the kernel */
reg = 小于0x50>; /* slave_addr,可以修改 */
status = "okay";
};
};
按上述配置完成后,该TWI控制器即注册为一个从设备,设备地址为上述定义的slave_addr,该TWI控制器与其他master的sck和sda连接后可以进行正常通信。
模块介绍
Linux中的I2C体系结构是指Linux内核中用于管理和控制I2C(Inter-Integrated Circuit)总线的组织结构和架构。I2C总线是一种串行通信总线,常用于连接微控制器、传感器、存储器和其他外设,以实现它们之间的通信。
在Linux内核中,I2C体系结构主要由以下几个部分组成:
-
用户空间:用户空间包括所有使用I2C设备的应用程序。这些应用程序通过系统提供的接口与内核进行通信,从而与I2C设备进行数据交换。
-
内核空间:内核空间包括了驱动程序和管理I2C总线的核心模块。这些模块负责实现对I2C总线和连接在上面的设备的管理和控制。
-
硬件:硬件部分包括了实际的物理设备,包括I2C控制器和I2C外设。I2C控制器通常集成在主板或者处理器中,而外设则连接在I2C总线上,通过控制器进行数据交换。
在Linux内核中,对I2C总线的管理和控制是通过一系列的模块来完成的,这些模块包括:
-
I2C核心(I2C core):负责提供对I2C总线的核心功能和抽象,包括对I2C控制器和外设的管�理、数据传输等。
-
I2C控制器驱动程序(I2C controller drivers):这些驱动程序负责与硬件I2C控制器进行通信,并提供统一的接口给上层的I2C核心模块使用。
-
I2C从设备驱动程序(I2C client drivers):这些驱动程序负责与连接在I2C总线上的外设进行通信,并提供相应的功能给上层的应用程序使用。
-
I2C总线驱动程序(I2C bus drivers):这些驱动程序负责管理和控制特定类型的I2C总线,例如SMBus等。
通过这些模块的协同工作,Linux内核可以实现对I2C总线的管理和控制,使得开发者可以方便地使用和操作连接在I2C总线上的各种外设。
模块初始化流程

I2C设备初始化流程如下所示:
- 获取I2C设备的时钟,获取电源配置,获取引脚配置
- 配置电源适配器,配置引脚,配置时钟
- 如果需要使用DMA传输,软重启设备
模块数据发送流程
当上层应用使用I2C在传输数据的时候,会调用会 twi\_algorithm 结构体的 master_xfer 函数,具体如下:
static const struct i2c_algorithm sunxi_twi_algorithm = {
.master_xfer = sunxi_twi_xfer,
.functionality = sunxi_twi_functionality,
#if IS_ENABLED(CONFIG_I2C_SLAVE)
.reg_slave = sunxi_twi_reg_slave,
.unreg_slave = sunxi_twi_unreg_slave,
#endif
};
其中 sunxi_twi_xfer 的定义如下所示:
static int sunxi_twi_xfer(struct i2c_adapter *adap, struct i2c_msg *msgs, int num)
{
struct sunxi_twi *twi = (struct sunxi_twi *)adap->algo_data;
...
/* then the sunxi_twi_runtime_reseme() call back */
ret = pm_runtime_get_sync(twi->dev);
sunxi_twi_soft_reset(twi); //软重启I2C
ret = sunxi_twi_bus_barrier(&twi->adap);
/* set the twi status to idle */
twi->result = RESULT_IDLE;
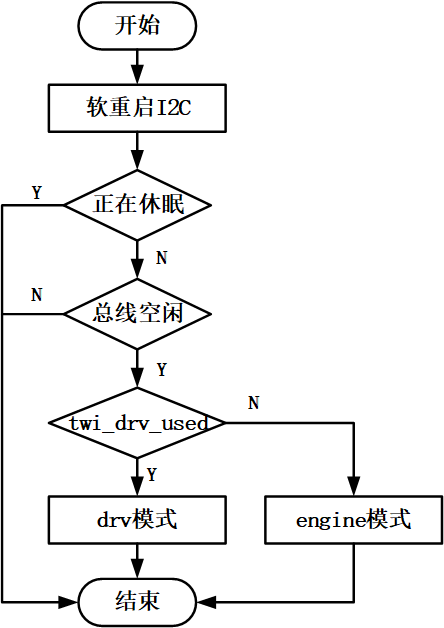
if (twi->twi_drv_used)
ret = sunxi_twi_drv_xfer(twi, msgs, num); //drv模式
else
ret = sunxi_twi_engine_xfer(twi, msgs, num); //engine模式
return ret;
}
可见该函数是判断使用 engine 模式传输数据还是 drv 模式传输数据,其决定于设备树中的 twi_drv_used 配置。
��下面将会对 engine模式的传输流程进行分析:
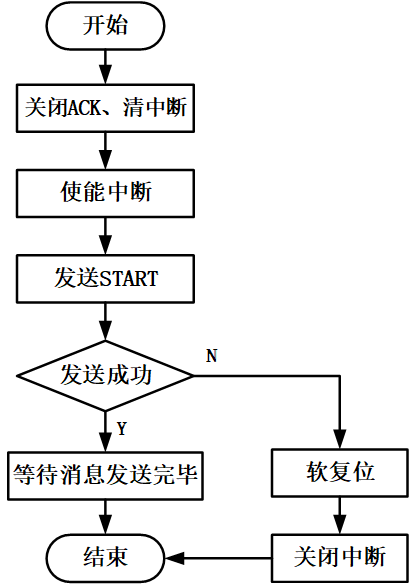
在该传输中,先重启TWI设备,在配置需要传输的数据,使能TWI中断,然后启动TWI进行数据的传输,等待数据传输完毕。
模块 Delay Init 处理流程
对于 delay_init 的处理流程,可以分为以下几个步骤:
-
Linux驱动的初始化:在Linux内核启动时,驱动程序会被加载,并且执行相应的probe函数来初始化设备。在TWI(Two-Wire Interface,双线接口)驱动中,通常会执行probe函数来获取和初始化硬件资源。
-
跳过硬件资源获取:由于需要在异构系统中先由异构小核使用TWI资源,因此在Linux执行probe函数时,需要跳过硬件资源的获取部分,也就是暂时不执行sunxi_twi_hw_init()函数,以避免与异构小核的资源使用冲突。
-
等待远端信号通知:Linux在初始化过程中会启动一个等待机制,等待来自远端的信号通知,以确定何时可以安全地初始化TWI资源。这个信号通知通常通过rpmsg(Remote Processor Messaging)等方式进行传递。
-
接收信号通知:一旦远端完成了对TWI资源的使用,并且通过rpmsg向Linux发送了信号通知,Linux会收到这个通知,并且在接收到通知后执行相应的处理程序。
-
执行资源获取函数:在接收到远端信号通知后,Linux会执行TWI驱动中的资源获取函数,例如sunxi_twi_hw_init(),以完成对TWI资源的初始化。
通过以上流程,Linux可以在异构系统中平滑地与异构小核进行TWI资源的共享和切换,确保在使用结束后及时初始化TWI资源,避免资源竞争和冲突。
休眠唤醒处理流程
-
运行时休眠唤醒处理流程:
- Runtime Suspend/Runtime Resume函数使用:通过在TWI驱动中实现runtime_suspend和runtime_resume函数,可以实现TWI在一定时间内未被调用时自动进入休眠状态,以节省能耗,并在需要时自动唤醒恢复正常工作。
- 系统休眠唤醒时的处理:在系统休眠过程中,针对非PMU(Power Management Unit)使用的TWI,首先关闭I2C子系统的调用,并确保任何正在进行的数据传输都已完成。最后,调用pm_runtime_force_suspend函数关闭电源、总线、时钟和引脚,将TWI状态设置为suspended。而对于PMU使用的TWI,直接退出,以确保在CPU和唤醒时能够正常使用。
- 系统唤醒时的处理:在系统唤醒时,对于非PMU使用的TWI,只进行上电操作,而不会真正调用到runtime_resume函数。TWI会在被真正使用时,通过调用runtime_resume函数来使能总线、时钟和引脚。
-
注意事项:
- 模块的休眠唤醒函数调用顺序:确保TWI的休眠唤醒函数在TWI的使用之前执行,以确保在TWI进行传输时,TWI资源已经准备好并能够正常使用。
- 时钟的�稳定性:在休眠期间确保TWI的父时钟未被修改,以免在唤醒后导致TWI因时钟频率异常而无法工作。
关机流程
关机流程中对TWI的处理流程如下:
- 对于PMU使用的TWI:直接退出,以确保在CPUs中能够继续正常使用完成关机,不做任何处理。
- 对于正在使用中的TWI:
- 确保传输完成最后一笔数据。
- 修改TWI状态为SUNXI_TWI_XFER_STATUS_SHUTDOWN,表示TWI已处于关机状态。
- TWI处于SUNXI_TWI_XFER_STATUS_SHUTDOWN状态时的行为:
- 当TWI处于SUNXI_TWI_XFER_STATUS_SHUTDOWN状态时,调用i2c_transfer函数会显示失败,即TWI拒绝被使用。这是为了避免在关机过程中对TWI进行操作,以确保安全关机和系统稳定性。
模块内部接口
static int sunxi_twi_xfer(struct i2c_adapter *adap, struct i2c_msg *msgs, int num)
- 功能描述:当I2C Core发来消息时,该接口被调用以启动一次I2C的读写操作,首先发送Start信号,然后执行消息中指定的读写操作。
- 参数说明:adap指向当前的I2C适配器,msgs指向待处理的I2C消息数组,num表示待处理的I2C消息个数。
- 返回值:返回已成功处理的I2C消息个数,��确保消息被正确发送和处理。
static irqreturn_t sunxi_twi_handler(int this_irq, void * dev_id)
- 功能描述:处理TWI控制器产生的中断信号,即当TWI控制器触发中断时,该函数被调用以进行中断处理。
- 参数说明:this_irq表示中断号,dev_id是自�定义的回调参数,通常是指向struct sunxi_twi结构体的指针,用于在中断处理函数中获取TWI控制器的相关信息。
- 返回值:IRQ_HANDLED表示中断已经被正确处理,IRQ_NONE表示不是此设备的中断,通常在中断处理函数无法处理该中断时返回。
I2C CORE 接口
int i2c_transfer(struct i2c_adapter *adap, struct i2c_msg *msgs, int num);
完成TWI总线和TWI设备之间的一定数目的TWI消息交互。
-
参数:
adap:指向所属的TWI总线控制器。msgs:指向i2c_msg类型的指针,表示待处理的TWI消息数组。num:表示一次需要处理几个TWI消息。
-
返回值:
- 大于0:已经处理的消息个数。
- 小于0:失败。
int i2c_master_recv(const struct i2c_client *client, char *buf, int count);
通过封装i2c_transfer()完成一次I2C接收操作,即从I2C设备读取数据。
-
参数:
client:指向当前TWI设备的实例。buf:用于保存接收到的数据的缓存。count:数据缓存buf的长度。
-
返回值:
- \大于0:成功接收的字节数。
- 小于0:失败。
int i2c_master_send(const struct i2c_client *client, const char *buf, int count)。
通过封装i2c_transfer()完成一次I2c发送操作。
-
参数:
-
client:指向当前TWI从设备的实例; -
buf:要发送的数据; -
count:要发送的数据长度。
-
-
返回值:
- \大于0:成功发送的字节数;
- 小于0:失败。
I2C 用户态接口
-
打开设备文件:
- 函数原型:
int open(const char *pathname, int flags) - 参数:
pathname:要打开的设备文件的路径。flags:打开文件的标志,如读取、写入、追加等。
- 返回值:
- 若成功,则返回文件描述符(非负整数),用于后续的读写操作。
- 若失败,则返回-1,并设置errno来指示错误类型。
- 函数原型:
-
写入数据:
- 函数原型:
ssize_t write(int fd, const void *buf, size_t count) - 参数:
fd:已打开的I2C设备文件的文件描述符。buf:要写入的数据的缓冲区指针。count:要写入的数据的字节数。
- 返回值:
- 若成功,则返回实际成功写入的字节数。
- 若失败,则返回-1,并设置errno来指示错误类型。
- 函数原型:
-
读取数据:
- 函数原型:
ssize_t read(int fd, void *buf, size_t count) - 参数:
fd:已打开的I2C设备文件的文件描述符。buf:用于存储读取数据的缓冲区指针。count:要读取的数据的最大字节数。
- 返回值:
- 若成功,则返回实际成功读取的字节数。
- 若已到达文件末尾,则返回0。
- 若失败,则返回-1,并设置errno来指示错误类型。
- 函数原型:
-
控制操作:
- 函数原型:
int ioctl(int fd, unsigned long request, ...) - 参数:
fd:已打开的I2C设备文件的文件描述符。request:控制操作的请求码,用于指定要执行的操作。...:可选的参数,用于传递控制操作所需的其他信息。
- 返回值:
- 若成功,则返回0或者执行操作所返回的特定值。
- 若失败,则返回-1,并设置errno来指示错误类型。
- 函数原型:
使用范例
内核态
#include <linux/init.h>
#include <linux/module.h>
#include <linux/i2c.h>
static struct i2c_client *client;
static int __init i2c_example_init(void)
{
struct i2c_adapter *adapter;
struct i2c_board_info board_info;
struct i2c_client *new_client;
printk(KERN_INFO "I2C Example: Initializing\n");
// 获取第一个 I2C 总线适配器
adapter = i2c_get_adapter(0);
if (!adapter) {
printk(KERN_ERR "I2C Example: Failed to get adapter\n");
return -ENODEV;
}
// 填充 I2C 设备信息
memset(&board_info, 0, sizeof(board_info));
strlcpy(board_info.type, "example_device", I2C_NAME_SIZE);
// 在 I2C 总线上注册新的设备
new_client = i2c_new_device(adapter, &board_info);
if (!new_client) {
printk(KERN_ERR "I2C Example: Failed to register device\n");
i2c_put_adapter(adapter);
return -ENODEV;
}
client = new_client;
// 这里可以执行对设备的操作,如读写寄存器等
return 0;
}
static void __exit i2c_example_exit(void)
{
printk(KERN_INFO "I2C Example: Exiting\n");
if (client) {
// 从总线上注销设备
i2c_unregister_device(client);
}
}
module_init(i2c_example_init);
module_exit(i2c_example_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("Your Name");
MODULE_DESCRIPTION("I2C Example Module");
用户态
#include <sys/ioctl.h>
#include <fcntl.h>
#include <linux/i2c-dev.h>
#include <linux/i2c.h>
#define CHIP "/dev/i2c-1"
#define CHIP_ADDR 0x50
int main()
{
unsigned char rddata;
unsigned char rdaddr[2] = {0, 0}; /* 将要读取的数据在芯片中的偏移量 */
unsigned char wrbuf[3] = {0, 0, 0x3c}; /* 要写的数据,头两字节为偏移量 */
int fd = open(CHIP, O_RDWR);
if (fd < 0)
{
printf("open "CHIP"failed\n");
goto exit;
}
if (ioctl(fd, TWI_SLAVE_FORCE, CHIP_ADDR) < 0)
{ /* 设置芯片地址 */
printf("oictl:set slave address failed\n");
goto close;
}
printf("input a char you want to write to E2PROM\n");
wrbuf[2] = getchar();
printf("write return:%d, write data:%x\n", write(fd, wrbuf, 3), wrbuf[2]);
sleep(1);
printf("write address return: %d\n",write(fd, rdaddr, 2)); /* 读取之前首先设置读取的偏移量 */
printf("read data return:%d\n", read(fd, &rddata, 1));
printf("rddata: %c\n", rddata);
close(fd);
exit:
return 0;
}
FAQ
TWI数据未完全发送
问题现象: incomplete xfer。具体的log如下所示:
[ 1658.926643] sunxi_twi_do_xfer()1936 - [twi0] incomplete xfer (status: 0x20, dev addr: 0x50)
[ 1658.926643] sunxi_twi_do_xfer()1936 - [twi0] incomplete xfer (status: 0x48, dev addr: 0x50)
问题分析:此错误表示主控已经发送了数据(status值为0x20时,表示发送了SLAVE ADDR + WRITE;status值为0x48时,表示发送了SLAVE ADDR + READ),但是设备没有回ACK,这表明设备无响应,应该检查是否未接设备、接触不良、设备损坏和上电时序不正确导致的设备未就绪等问题。
问题排查步骤:
步骤1:通过设备树里面的配置信息,核对引脚配置是否正确。每组TWI都有好几组引脚配置。
步骤2:更换TWI总线下的设备为at24c16,用i2ctools读写at24c16看看是否成功,成功则表明总线工作正常;
步骤3:排查设备是否可以正常工作以及设备与TWI之间的硬件接口是否完好;
步骤4:详细了解当前需要操作的设备的初始化方法,工作时序,使用方法,排查因初始化设备不正确导致通讯失败;
步骤5:用示波器检查TWI引脚输出波形,查看波形是否匹配。
TWI起始信号无法发送
问题现象: START can't sendout!。具体的log如下所示:
sunxi_twi_do_xfer()1865 - [twi1] START can't sendout!
问题分析:此错误表示TWI无法发送起始信号,一般跟TWI总线的引脚配置以及时钟配置有关。应该检查引脚配置是否正确,时钟配置是否正确,引脚是否存在上拉电阻等等。
问题排查步骤:
步骤1:重新启动内核,通过查看log,分析TWI是否成功初始化,如若存在引脚配置问题,应核对引脚信息是否正确;
步骤2:根据原理图,查看TWI-SCK和TWI-SDA是否经过合适的上拉电阻接到3.3v电压;
步骤3:用万用表量SDA与SCL初始电压,看电压是否在3.3V附近(断开此TWI控制器所有外设硬件连接与软件通讯进程);
步骤4:核查引脚配置以及clk配置是否进行正确设置;
步骤5: 测试PIN的功能是否正常,利用寄存器读写的方式,将PIN功能直接设为INPUT功能,然后将PIN上拉和接地改变PIN状态,读PIN的状态,看是否匹配;
步骤6:测试CLK的功能是否正常,利用寄存器读写的方式,将TWI的CLK gating等打开,,然后读取相应TWI的寄存器信息,读TWI寄存器的数据,查看寄存器数据是否正常;
TWI��终止信号无法发送
问题现象: STOP can't sendout。具体的log如下所示:
twi_stop()511 - [twi4] STOP can't sendout!
sunxi_twi_core_process()1726 - [twi4] STOP failed!
问题分析:此错误表示TWI无法发送终止信号,一般跟TWI总线的引脚配置。应该检查引脚配置是否正确,引脚电压是否稳定等等。
问题排查步骤:
步骤1:根据原理图,查看TWI-SCK和TWI-SDA是否经过合适的上拉电阻接到3.3v电压;
步骤2:用万用表量SDA与SCL初始电压,看电压是否在3.3V附近(断开此TWI控制器所有外设硬件连接与软件通讯进程);
步骤3: 测试PIN的功能是否正常,利用寄存器读写的方式,将PIN功能直接设为INPUT功能,然后将PIN上拉和接地改变PIN状态,读PIN的状态,看是否匹配;
步骤4: 查看设备树配置,把其他用到SCK/SDA引脚的节点关闭,重新测试TWI通信功能。
TWI传送超时
问题现象: xfer timeout。具体的log如下所示:
[123.681219] sunxi_twi_do_xfer()1914 - [twi3] xfer timeout (dev addr:0x50)
问题分析:此错误表示主控已经发送完起始信号,但是在与设备通信的过程中无法正常完成数据发送与接收,导致最终没有发出终止信号来结束TWI传输,导致的传输超时问题。应该检查引脚配置是否正常,CLK配置是否正常,TWI寄存器数据是否正常,是否有其他设备干扰,中断是否正常等问题。
问题排查步骤:
步骤1:核实TWI控制器配置是否正确;
步骤2:根据原理图,查看TWI-SCK和TWI-SDA是否经过合适的上拉电阻接到3.3v电压;
步骤3:用万用表量SDA与SCL初始电压,看电压是否在3.3V附近(断开此TWI控制器所有外设硬件连接与软件通讯进程);
步骤4:关闭其他TWI设备,重新进行烧录测试TWI功能是否正常;
步骤5: 测试PIN的功能是否正常,利用寄存器读写的方式,将PIN功能直接设为INPUT功能,然后将PIN上拉和接地改变PIN状态,读PIN的状态,看是否匹配;
步骤6:测试CLK的功能是否正常,利用寄存器读写的方式,将TWI的CLK gating等打开,,然后读取相应TWI的寄存器信息,读TWI寄存器的数据,查看寄存器数据是否正常;
步骤7:根据相关的LOG跟踪TWI代码执行流程,分析报错原因。