EMAC - 以太网络
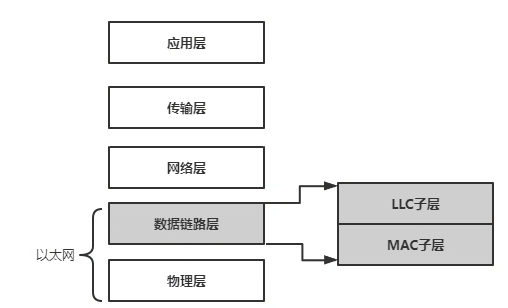
以太网是一种局域网通信技术,遵循IEEE802.3协议规范,包括10 Mbps、100 Mbps、1000 Mbps和10 Gbps等多种速率的以太网。以太网与TCP/IP协议族的物理层(L1)和数据链路层(L2)相关,其中数据链路层包括逻辑链路控制(LLC)和媒体访问控制(MAC)子层。以太网在TCP/IP协议族中的位置如下图所示:
Linux 内核中网络设备框架如下图所示:
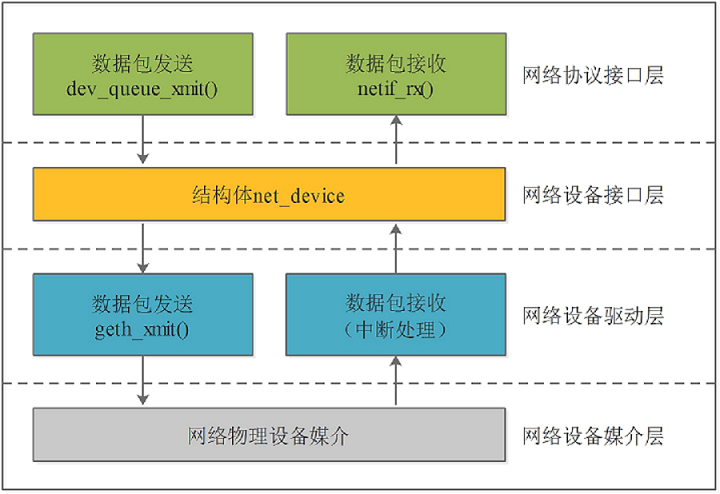
- 网络协议接口层:向网络协议层提供统一的数据包收发接口,通过dev_queue_xmit()发送数据,并通过netif_rx()接收数据
- 网络设备接口层:向协议接口层提供统一的用于描述网络设备属性和操作的结构体net_device,该结构体是设备驱动层中各函数的容器。
- 网络设备驱动层:实现net_device中定义的操作函数指针(通常不是全部),驱动硬件完成相应动作。
- 网络设备媒介层:完成数据包发送和接收的物理实体,包括网络适配器和具体的传输媒介。
模块配置
Kernel 协议栈配置
对于 Linux 系统,使用以太网需要配置以太网协议栈,包括如下配置项
CONFIG_PACKET
CONFIG_UNIX
CONFIG_UNIX_DIAG
CONFIG_NET_KEY
CONFIG_INET
CONFIG_IP_MULTICAST
CONFIG_IP_ADVANCED_ROUTER
CONFIG_IP_FIB_TRIE_STATS
CONFIG_IP_MULTIPLE_TABLES
Kernel 驱动配置
对于 EMAC 的驱动,由于芯片存在多套以太网IP,包括 EMAC,GMAC,GMAC-200。其适配的以太网驱动为不同驱动框架。这里分开说明
EMAC 配置说明
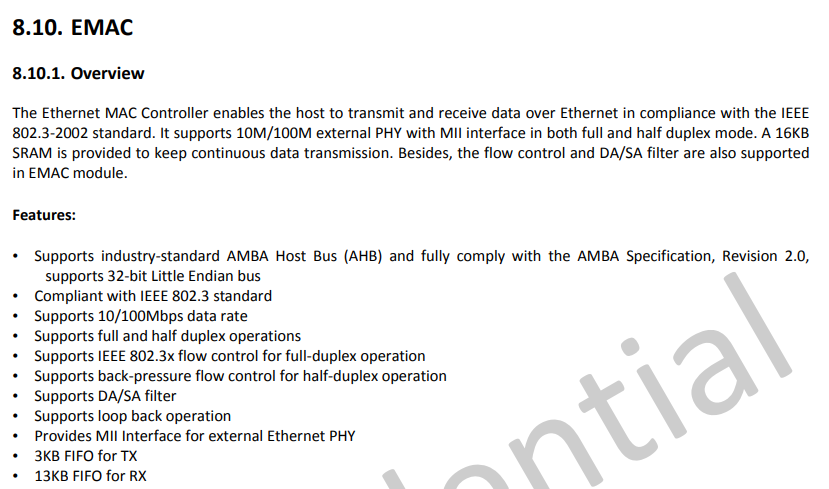
EMAC 控制器描述如下图所示,其主要特点为最高支持百兆网络。
内核配置项目为
CONFIG_AW_EMAC
CONFIG_AW_EMAC_MDIO
内核设备树配置项
mdio1: mdio1@1c0b080 {
compatible = "allwinner,sun4i-mdio";
#address-cells = <1>;
#size-cells = <0>;
reg = <0x0 0x01c0b080 0x0 0x14>;
status = "okay";
phy1: ethernet-phy@1 {
reg = <1>;
};
};
emac0: emac0@1c0b000 {
compatible = "allwinner,sunxi-emac";
reg = <0x0 0x01c0b000 0x0 0x0c000>;
interrupts = <GIC_SPI 55 IRQ_TYPE_LEVEL_HIGH>;
interrupt-names = "emacirq";
clocks = <&ccu CLK_BUS_EMAC>;
clock-names = "emac";
resets = <&ccu RST_BUS_EMAC>;
pinctrl-names = "default";
pinctrl-0 = <&emac_pins_a>;
phy-rst = <&pio PH 27 1 1 1 0>;
phy-handle = <&phy1>;
status = "disabled";
};
-
compatible表征具体的设备,用于驱动和设备的绑定; -
reg设备使用的地址; -
interrupts设备使用的中断; -
clocks设备使用的时钟; -
pinctrl-0设备active状态下的GPIO配置; -
pinctrl-1设备sleep状态下的GPIO配置; -
phy-rst(注:更换PHY器件需要更改此属性) PHY复位脚; -
phy-handlephy器件句柄; -
phy子节点配置(注:更换PHY器件需要更改此属性):
reg表征phy地址。
板级配置项目,主要是配置 emac 的 PHY RST 控制脚,和配置启用节点。
&mdio1 {
status = "okay";
};
&emac0 {
pinctrl-names = "default";
pinctrl-0 = <&emac_pins_a>;
phy-rst = <&pio PH 27 GPIO_ACTIVE_LOW>;
status = "okay";
};
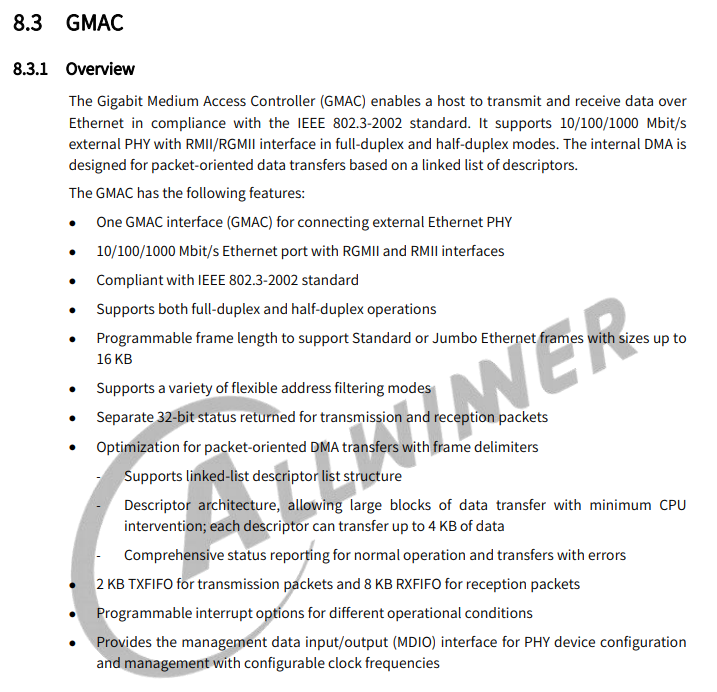
GMAC 配置说明
GMAC 控制器描述如下图所示,其支持最高千兆网络。
内核配置项目为:
CONFIG_AW_GMAC
CONFIG_AW_GMAC_MDIO
设备树配置项目:
mdio0: mdio0@4500048 {
compatible = "allwinner,sunxi-mdio";
#address-cells = <1>;
#size-cells = <0>;
reg = <0x0 0x04500048 0x0 0x8>;
status = "disabled";
gmac0_phy0: ethernet-phy@1 {
/* RTL8211F (0x001cc916) */
reg = <1>;
max-speed = <1000>; /* Max speed capability */
reset-gpios = <&pio PH 19 GPIO_ACTIVE_LOW>;
/* PHY datasheet rst time */
reset-assert-us = <10000>;
reset-deassert-us = <150000>;
};
};
gmac0: gmac0@4500000 {
compatible = "allwinner,sunxi-gmac";
reg = <0x0 0x04500000 0x0 0x10000>,
<0x0 0x03000030 0x0 0x4>;
interrupts = <GIC_SPI 46 IRQ_TYPE_LEVEL_HIGH>;
interrupt-names = "gmacirq";
clocks = <&ccu CLK_GMAC0>, <&ccu CLK_GMAC0_25M>;
clock-names = "gmac", "phy25m";
resets = <&ccu RST_BUS_GMAC0>;
phy-handle = <&gmac0_phy0>;
status = "disabled";
};
compatible表征具体的设备,用于驱动和设备的绑定;reg设备使用的地址;interrupts设备使用的中断;clocks设备使用的时钟;status是否使能该设备节点;phy-handlephy器件句柄;- phy子节点配置(注:更换PHY器件需要更改此属性):
reg表征phy地址,max-speed表征phy的最大速率,reset-gpios表征phy硬件复位的引脚,reset-assert-us硬件复位拉低时间,reset-deassert-us硬件复位拉
板级设备树配置:
&mdio0 {
status = "okay";
};
&gmac0 {
phy-mode = "rgmii";
pinctrl-names = "default", "sleep";
pinctrl-0 = <&gmac0_pins_default>;
pinctrl-1 = <&gmac0_pins_sleep>;
sunxi,phy-clk-type = <0>;
tx-delay = <3>;
rx-delay = <4>;
gmac3v3-supply = <®_cldo3>;
status = "okay";
};
phy-modeGMAC与PHY之间的物理接口,如MII、RMII、RGMII等;pinctrl-0设备active状态下的GPIO配置;sunxi,phy-clk-type配置phy使用的时钟,0表示使用soc内置的25 M 时钟;tx-delaytx时钟延迟,tx-delay取值0-7,一档约536 ps(皮秒);rx-delayrx时钟延迟,rx-delay取值0-31,一档约186 ps(皮秒);gmac3v3-supplygmac电源脚,根据实际情况配置;status是否使能该设备节点。
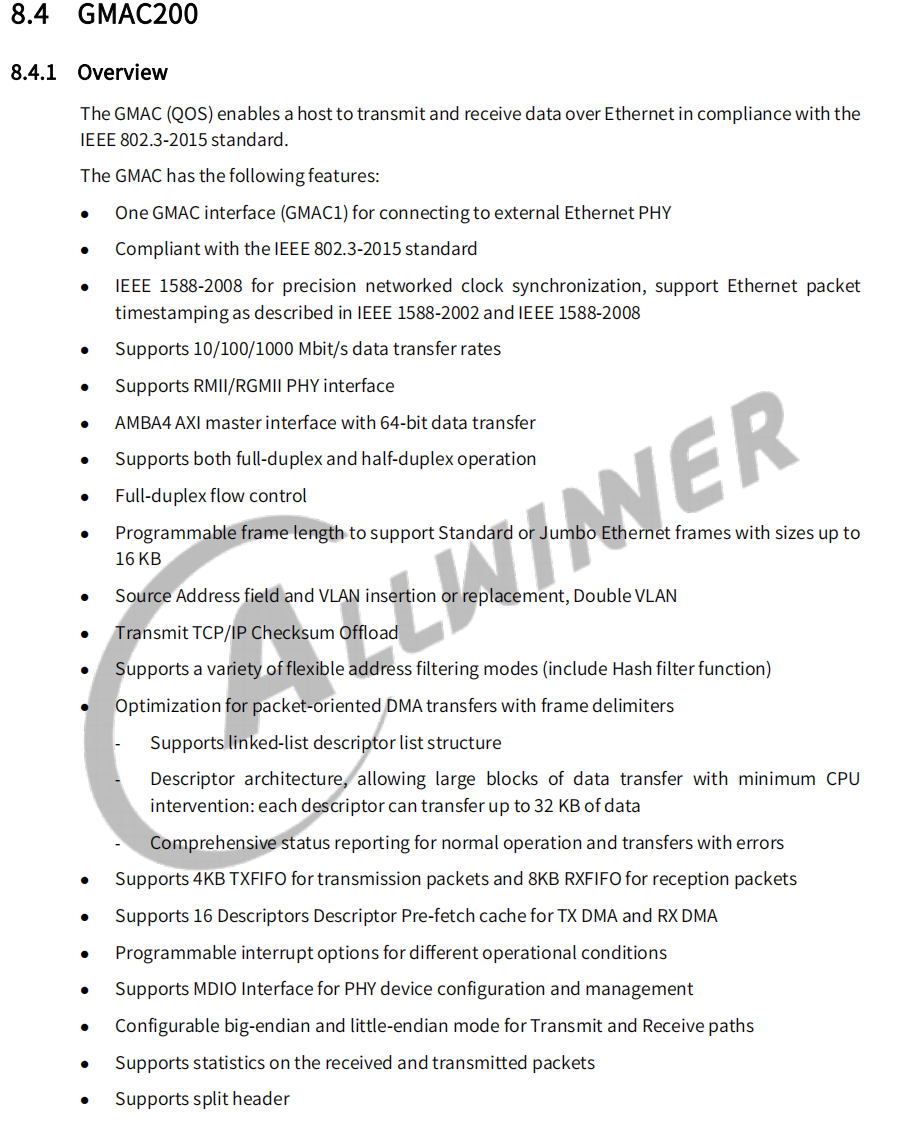
GMAC-200 配置说明
GMAC-200 控制器描述如下,其支持标准更新更丰富,其使用的是内核标准 stmmac 驱动。
内核配置项目为:
CONFIG_AW_STMMAC_ETH
设备树配置项目:
gmac1: ethernet@4510000 {
compatible = "allwinner,sunxi-gmac-200", "snps,dwmac-4.20a";
reg = <0x0 0x04510000 0x0 0x10000>,
<0x0 0x03000034 0x0 0x4>;
interrupts = <GIC_SPI 47 IRQ_TYPE_LEVEL_HIGH>;
interrupt-names = "macirq";
clocks = <&ccu CLK_GMAC1>, <&ccu CLK_GMAC1_MBUS_GATE>, <&ccu CLK_GMAC1_25M>;
clock-names = "stmmaceth", "pclk", "phy25m";
resets = <&ccu RST_BUS_GMAC1>;
reset-names = "stmmaceth";
phy-handle = <&gmac1_phy0>;
status = "disabled";
snps,fixed-burst;
snps,axi-config = <&gmac1_stmmac_axi_setup>;
snps,mtl-rx-config = <&gmac1_mtl_rx_setup>;
snps,mtl-tx-config = <&gmac1_mtl_tx_setup>;
gmac1_stmmac_axi_setup: stmmac-axi-config {
snps,wr_osr_lmt = <0xf>;
snps,rd_osr_lmt = <0xf>;
snps,blen = <256 128 64 32 16 8 4>;
};
gmac1_mtl_rx_setup: rx-queues-config {
snps,rx-queues-to-use = <1>;
queue0 {};
};
gmac1_mtl_tx_setup: tx_queues-config {
snps,tx-queues-to-use = <1>;
queue0 {};
};
mdio1: mdio1@1 {
compatible = "snps,dwmac-mdio";
#address-cells = <1>;
#size-cells = <0>;
gmac1_phy0: ethernet-phy@1 {
compatible = "ethernet-phy-ieee802.3-c22";
reg = <0x1>;
max-speed = <1000>; /* Max speed capability */
reset-gpios = <&pio PJ 27 GPIO_ACTIVE_LOW>;
/* PHY datasheet rst time */
reset-assert-us = <10000>;
reset-deassert-us = <150000>;
};
};
};
compatible: 表征具体的设备,用于驱动和设备的绑定;reg: 设备使用的地址;interrupts: 设备使用的中断;clocks: 设备使用的时钟;status: 是否使能该设备节点;phy-handle: phy器件句柄;- phy子节点配置(注:更换PHY器件需要更改此属性):
reg: 表征phy地址,max-speed: 表征phy的最大速率,reset-gpios: 表征phy硬件复位的引脚,reset-assert-us: 硬件复位拉低时间,reset-deassert-us: 硬件复位拉高时间;
snps,axi-config: AXI总线模式参数;snps,mtl-rx-config: rx队列参数;snps,mtl-tx-config: tx队列参数。
板级设备树配置:
&gmac1 {
phy-mode = "rgmii";
pinctrl-names = "default", "sleep";
pinctrl-0 = <&gmac1_pins_default>;
pinctrl-1 = <&gmac1_pins_sleep>;
aw,soc-phy25m;
tx-delay = <3>;
rx-delay = <4>;
dwmac3v3-supply = <®_cldo3>;
status = "okay";
mdio1: mdio1@1 {
gmac1_phy0: ethernet-phy@1 {
reset-gpios = <&pio PI 5 GPIO_ACTIVE_LOW>;
};
};
};
phy-mode: GMAC与PHY之间的物理接口,如MII、RMII、RGMII等;pinctrl-0: 设备active状态下的GPIO配置;aw,soc-phy25m: 属性表示使用SOC供的25M时钟给PHY;tx-delay: tx时钟延迟,tx-delay取值0-7,一档约536 ps(皮秒);rx-delay: rx时钟延迟,rx-delay取值0-31,一档约186 ps(皮秒);dwmac3v3-supply: gmac-200电源脚,根据实际情况配置;status: 是否使能该设备节点。
调试说明
常用以太网调试的软件包:
ifconfig
使用ifconfig -h查看支持的参数,如下所示:
/ # ifconfig -h
Usage:
ifconfig [-a] [-v] [-s] <interface> [[<AF>] <address>]
[add <address>[/<prefixlen>]]
[del <address>[/<prefixlen>]]
[[-]broadcast [<address>]] [[-]pointopoint [<address>]]
[netmask <address>] [dstaddr <address>] [tunnel <address>]
[outfill <NN>] [keepalive <NN>]
[hw <HW> <address>] [mtu <NN>]
[[-]trailers] [[-]arp] [[-]allmulti]
[multicast] [[-]promisc]
[mem_start <NN>] [io_addr <NN>] [irq <NN>] [media <type>]
[txqueuelen <NN>]
[[-]dynamic]
[up|down] ...
<HW>=Hardware Type.
List of possible hardware types:
loop (Local Loopback) slip (Serial Line IP) cslip (VJ Serial Line IP)
slip6 (6-bit Serial Line IP) cslip6 (VJ 6-bit Serial Line IP) adaptive (Adaptive Serial Line IP)
ash (Ash) ether (Ethernet) ax25 (AMPR AX.25)
netrom (AMPR NET/ROM) rose (AMPR ROSE) tunnel (IPIP Tunnel)
ppp (Point-to-Point Protocol) hdlc ((Cisco)-HDLC) lapb (LAPB)
arcnet (ARCnet) dlci (Frame Relay DLCI) frad (Frame Relay Access Device)
sit (IPv6-in-IPv4) fddi (Fiber Distributed Data Interface) hippi (HIPPI)
irda (IrLAP) x25 (generic X.25) infiniband (InfiniBand)
eui64 (Generic EUI-64)
<AF>=Address family. Default: inet
List of possible address families:
unix (UNIX Domain) inet (DARPA Internet) inet6 (IPv6)
ax25 (AMPR AX.25) netrom (AMPR NET/ROM) rose (AMPR ROSE)
ipx (Novell IPX) ddp (Appletalk DDP) ash (Ash)
x25 (CCITT X.25)
- -a:显示全部接口信息;
- -s:显示摘要信息;

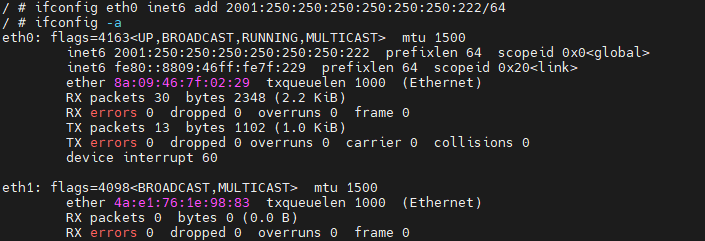
- add/del:添加对应网口的ipv6地址;
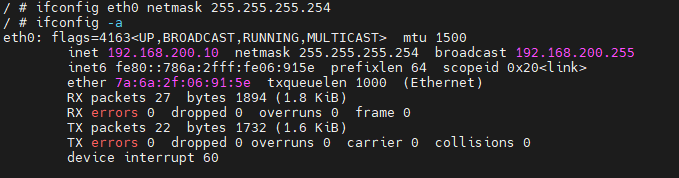
- netmask:设置子网掩码;
- hw:设置mac地址;

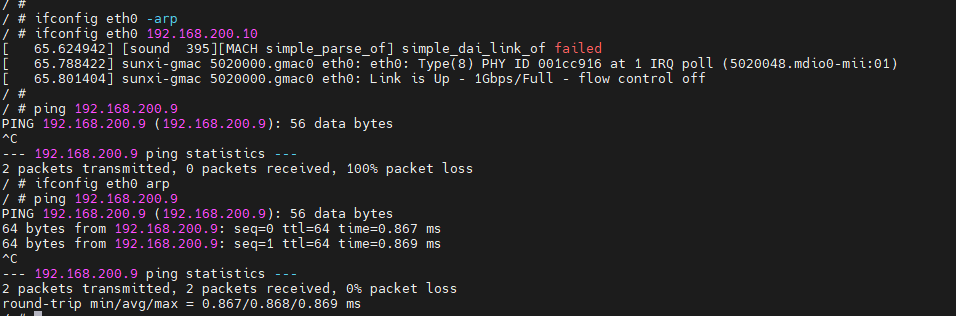
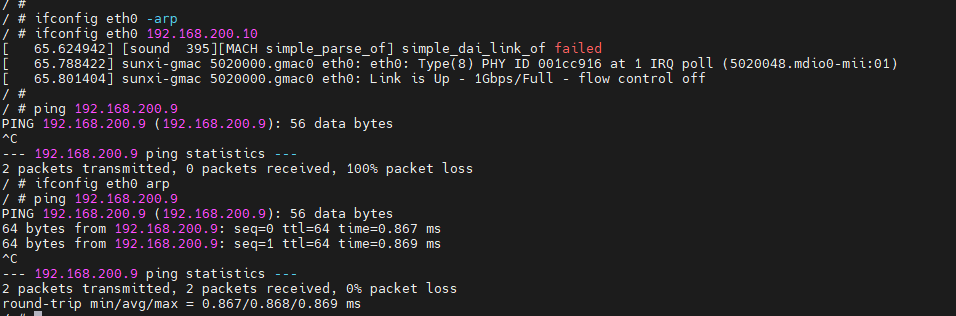
- arp:打开或者关闭对应网口是否支持arp功能,如下图所示,关闭arp协议,ping不通,打开之后就可以ping通;
route
设置和查看路由表都可以用 route 命令,设置内核路由表的命令格式是:
# route [add|del] [-net|-host] target [netmask Nm] [gw Gw] [[dev] If]
其中:
- add:添加一条路由规则;
- del:删除一条路由规则;
- -net:目的地址是一个网络;
- -host:目的地址是一个主机;
- target:�目的网络或主机;
- netmask:目的地址的网络掩码;
- gw:路由数据包通过的网关;
- dev:为路由指定的网络接口。
示例:
route add -host 192.168.200.9 dev eth0 #添加eth0的目的地址为192.168.200.9
route add -host 192.168.200.9 gw 192.168.200.1 #添加到目的地址192.168.200.9经过网关192.168.200.1
mii_reg
mii_reg 工具是GMAC驱动中提供的调试节点,其主要作用是对外部PHY寄存器地址进行读写操作。
启动网卡:
ifconfig eth0 up
进入操作目录:
cd sys/devices/platform/soc@3000000/450000.eth
注:不同的目录可能会因板卡不同有差异,此处为大致路径。
读取对应的phy寄存器:
addr: PHY地址
reg: PHY寄存器
val: 数据
写操作:
echo addr reg val > mii_write; cat mii_write
eg:
echo 0x00 0x1f 0xa43 > mii_write; cat mii_write
读操作:
echo addr reg > mii_read; cat mii_read
eg:
echo 0x10 0x06 > mii_read; cat mii_read
一次读多位寄存器操作: 0x01~0x0a
cat mii_reg
udhcpcethtool
常用测试方法
查看网络设备信息
- 查看网口状态:
ifconfig eth0 -a - 查看收发包统计:
cat /proc/net/dev - 查看当前速率:
cat /sys/class/net/eth0/speed
打开/关闭网络设备
- 打开网络设备:
ifconfig eth0 up
对于 GMAC 会显示 LOG:
sunxi-gmac 4500000.gmac0 eth0: eth0: Type(9) PHY ID 001cc916 at 1 IRQ poll (4500048.mdio0-mii:01)
对于 GMAC-200,会显示LOG:
dwmac-sunxi 4510000.ethernet eth1: PHY [stmmac-0:01] driver [Generic PHY] (irq=POLL)
dwmac-sunxi 4510000.ethernet eth1: Register MEM_TYPE_PAGE_POOL RxQ-0
dwmac4: Master AXI performs fixed burst length
dwmac-sunxi 4510000.ethernet eth1: No Safety Features support found
dwmac-sunxi 4510000.ethernet eth1: IEEE 1588-2008 Advanced Timestamp supported
dwmac-sunxi 4510000.ethernet eth1: configuring for phy/rgmii link mode
插上网线
- 关闭网络设备:
ifconfig eth0 down
sunxi-gmac 4500000.gmac0 eth0: Link is Down
配置网络设备
- 配置静态IP地址:
ifconfig eth0 192.168.1.110 - 配置MAC地址:
ifconfig eth0 hw ether 00:11:22:aa:bb:cc - 动态获取IP地址:
udhcpc -i eth0 - PHY强制模式:
ethtool -s eth0 speed 1000 duplex full autoneg on(设置1000 Mbps速率、全双工、开启自协商)
测试网络联通
- 设备连通性测试
ping 对端 ip 地址,本机ip和对端ip的前三个网段需相同才能ping通。
ping 192.168.1.100
- TCP 吞吐测试
假设 Server 端 IP 为:192.168.1.100
Server端:iperf3 -s -i 1
Client端:iperf3 -c 192.168.1.100 -i 1 -t 60
- UDP 吞吐测试
假设 Server 端 IP 为:192.168.1.100
Server端:iperf3 -s -u -i 1
Client端:iperf3 -c 192.168.1.100 -u -b 1000M -i 1 -t 60
本地网络环路性能测试
iperf3 -s &;iperf3 -c 127.0.0.1
delay参数节点
delay参数调试节点是GMAC驱动中提供的调整千兆RGMII接口时序的节点。
进入操作目录:
cd /sys/devices/platform/soc/gmac/
注:不同的目录可能会因板卡不同有差异,此处为大致路径。
调整rxdelay时序:
#rx_delay:val - rxdelay参数,0~31共32挡,每档将采样时间推迟约130ps
echo val > rx_delay; cat rx_delay
调整txdelay时序:
#tx_delay:val - txdelay参数,0~7共8档,每档将采样时间推迟约536ps
echo val > tx_delay; cat tx_delay
jumbo帧测试方法
准备两台均支持jumbo帧的板卡直连对测。
步骤:
以千兆网卡为例;
(1)板卡A:ifconfig eth0 mtu 8100,板卡B:ifconfig eth0 mtu 8100(设置eth0的mtu大小为8100);
(2)板卡A:ifconfig eth0 192.168.200.10,板卡B:ifconfig eth0 192.168.200.9;
(3)板卡A:ping 192.168.200.9 -s 8000(传输8000长度的数据)。
注:
(1)百兆网卡不存在带宽不足情况,一般不需要使用jumbo帧;
(2)百兆网卡支持的 jumbo 帧范围为1500至4000,千兆网卡支持的 jumbo 帧范围为 1500 至 8100;
(3)测试时两端mtu无需设置成相同大小;
(4)ping通即表明测试通过;
(5)ping传输8000长度的原因:mtu为整个以太网帧的长度,ping工具指定的长度8000为纯数据长度,不包括ICMP及以太网报头的长度。
以太网回环测试
问题背景:
以太网能正常up,但是ping不通。
复现步骤:
ping对端设备,例如ping 192.168.200.9。
问题分析:
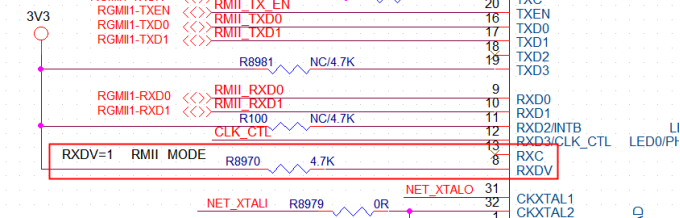
- PHY被设置成回环模式后,从MAC经过RMII/RGMII发送过来的数据不会再被发送到MDI上,而是在PHY内部PCS层进行回环,被回环到RGMII/RMII的接收通道,如下图所示;
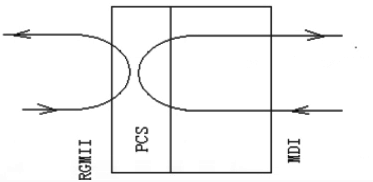
- 当设置了PHY的回环模式后,往外发包,如果小机端的rx能正常接收到数据,说明需要检查PHY到对端的硬件电路有无异常,反之需要检查RMII/RGMII接口的硬件电路有无异常;
测试办法:
- 通过GMAC驱动提供的节点,设置PHY的回环模式;
cd /sys/devices/platform/soc@3000000/4500000.gmac0 #注:此处为大致路径,不同版本内核路径有轻微差异
echo 2 > loopback_test; cat loopback_test
- 往外ping包,观察tx和rx的增长数量是否一致,若tx和rx的增长数量一致,则需要重点排查PHY到对端的硬件电路有无异常;若不一致(例如rx收不到包或数量少于tx),则需要重点排查RMII/RGMII接口的硬件电路有无异常。
以太网带宽测试
- 对端准备一块经过验证的千兆带宽达标(>=900Mbps)或百兆带宽达标的(>=90Mbps)板子/PC;
- 保持测试板卡系统处于低负载状态,关闭无关DEBUG选项及不跑非原生应用;
- 将对端与测试板卡用网线直连;
- 指定双方IP地址为同一网段,例如:测试板卡
ifconfig eth0 192.168.200.10,对端:ifconfig eth0 192.168.200.9,PC的IP地址修改请参考7.2章节; - 发送测试:对端输入
iperf -s -i 1,测试板卡输入iperf -c 192.168.200.9 -i 1 -t 60; - 接收测试:测试板卡输入
iperf -s -i 1,对端输入iperf -c 192.168.200.10 -i 1 -t 60。
若按照上述步骤测试后,千兆带宽不达标,可能的影响因素包括:
- 单核CPU算力: DDR频率、CPU自身算力、CPU频率、CPU的访存能力都会影响到CPU算力;
- IP差异: GMAC使用AHB总线比GMAC-200的AXI总线带宽少10~40M左右;
- 系统负载: 以太网性能测试属于CPU消耗型任务,测试时系统需要保持在低负载的状态下,并且关闭无关的内核DEBUG选项;
- 硬件信号: 硬件信号时序(保证建立保持时��间最优,请使用7.4章节节点调试),硬件信号质量;
- 对端的发送与接收能力: 以太网测试时确保对端是经过验证的千兆带宽达标的平台;
- 总线抢占: 其他模块抢占GMAC的AHB总线及新GMAC的AXI总线带宽;
- 中断抢占及调度抢占: Android固件建议在测试时把GMAC中断放在单独的核上(比如大核,命令例如:
echo f0 > /proc/irq/498/smp_affinity,注:498是指GMAC的中断号,具体请以实际平台为准),Linux固件由于场景简单,一般无此需求。
注:
- 为什么要使用一块经过验证千兆带宽达标的板子直连对测;
- 千兆达标的板子:对端的带宽吞吐能力会直接影响到测试板卡的吞吐;
- 直连对测:避免引入无关因素,比如路由器的吞吐能力;
- 若测试千兆请使用千兆网线;
常见问题
ifconfig命令无eth0节点
问题现象
执行ifconfig eth0无相关log信息。
常见原因
以太网模块配置未打开或存在GPIO冲突。
排查步骤:
(1)抓取内核启动log,检查驱动probe是否成功;
(2)如果无驱动相关打印,请确认以太网基本配置是否打开;
(3)如果驱动probe��失败,请log定位具体原因,常见原因是GPIO冲突导致。
网络不通或网络丢包
问题现象:
ping不通对端设备、无法动态获取ip地址或有丢包现象。
问题分析:
一般原因是tx/rx通路不通
排查步骤:
(1)检查 ifconfig eth0 up 是否正常;
(2)检查 eth0 能否动态获取 IP 地址;
(3)若步骤1正常,但步骤2异常,需首先确认 TX/RX 哪条通路不通;
(4)若无法动态获取 IP 地址,可配置静态 IP,和对端设备互相 ping,如果和电脑对测,确保防火墙不会影响测试;
(5)检查对端设备能否收到数据包,若能收到,则说明 TX 通路正常,否则 TX 通路异常;
(6)检查本地设备能否收到数据包,若能收到,则说明 RX 通路正常,否则 RX 通路异常;
(7)若 TX 通路异常,可调整 tx-delay 参数或对照原理图检查 TX 通路是否异常,如漏焊关键器件;
(8)若 RX 通路异常,可调整 rx-delay 参数或对照原理图检查 RX 通路是否异常,如漏焊关键器件;
(9)若经过上述排查步骤问题仍未解决,需检查 PHY 供电与 GPIO 耐压是否匹配。
内核打印 Link is Up
- 保持网线插入网口,并连接以太网功能正常的对端设备;
ifconfig up网卡后,软件会起一个 1s 的轮询机制;- 轮询查询
PHY的02寄存器的Link status标志位,若为1,则根据PHY的速率/双工 更改MAC的速率/双工,并打印Link is up - xxxMbps/Full,若为0,则打印Link is Down; - 只有
Link status发生改变时才会打印,比如0->11->0; PHY的Link status标志位是只读的,根据两端PHY的自协商情况完成置1/清0,若遇到频繁Up/Down的情况,请参考第六章排查硬件问题。
找不到 PHY
运行 ifconfig eth0 up 显示如下输出
# GMAC
[ 25.506200] sunxi-gmac gmac0 eth0: Error:Could not connect to phy
# GMAC-200
[ 25.116200] dwmac-sunxi 45000000.ethernet eth0: stmmac_open: Cannot attach to PHY
-
检查
PHY是否正确初始化:确保给PHY供给了25M时钟,正确设置了PINMUX,以及确保PIN BANK电压已开启(如果适用)。如果出现PHY供电异常,可以检查供电电路以确保正常工作。此外,确保在激活网卡之前给PHY做了复位操作,以确保其处于正确的状态。如果遇到问题,请参考第六章的指南来检查PHY的硬件最小系统。 -
在更换了
PHY之后,要特别注意PHY地址是否发生了变化。如果PHY地址发生了变化,需要相应地更新配置文件或软件中的PHY地址。这可能涉及到重新编译驱动程序或更新设备树等操作。确保在更新后,系统能够正确识别并与新的PHY进行通信。 -
使用示波器检查
PHY的25M时钟是否正常,并使用万用表检查PHY的供电情况,包括AVDD33�、DVDDIO、ADVDD10OUT、DVDD10OUT等电压是否正常。 -
在设备树(
dts)中配置PHY的复位引脚:请参考原理图,将复位引脚配置到设备树的phy子节点的reset-gpios属性中。 -
处理
PHY地址变更:结合原理图上PHYADD相关引脚的电平,将PHY地址配置到设备树的phy子节点的reg属性中。如果无法确定PHY地址,有以下两种方法可以获取:-
使用
mii_reg工具手动读取对应地址的PHY寄存器,若能正确读取到寄存器(例如phyid寄存器),则表示PHY的地址为当前地址。 -
打开
mdio驱动(GMAC对应sunxi-mdio.c,GMAC200对应stmmac_mdio.c)开头的DEBUG宏,启动日志会打印PHY地址。以GMAC-200为例,日志如下所示,PHYADDR即为PHY地址,将这个值写入设备树phy子节点的reg属性中。
-
[ 2.814160] dwmac-sunxi 4510000.ethernet: PHYADDR = 1, PHYID = 0x1cc916
MAC复位失败
运行 ifconfig eth0 up 显示如下输出
# GMAC
[ 11.315214] sunxi-gmac gmac1 eth0: Error: Mac reset failed, please check phy and mac clk
# GMAC-200
[ 22.601790] dwmac-sunxi 45000000.ethernet eth0: stmmac_hw_setup: DMA engine initialization failed
[ 22.611644] dwmac-sunxi 45000000.ethernet eth0: stmmac_open: Hw setup failed
- 时钟引脚方向不正确:
- 对于
RMII接口,确保MAC的TXCK引脚是输入,由PHY输出该信号。 - 对于
RGMII接口,确保MAC的RGMII_CLKIN是输入,由PHY输出该信号。
- 对于
- 供给
PHY的25M时钟偏差过大:- 检查供给
PHY的25M时钟频率是否在合理范围内(一般为25Mhz±0.02Mhz),请参考PHY的数据手册。 - 如果时钟频率偏差过大,可能需要调整时钟源或修复时钟信号的源头问题。
- 检查供给
- 时钟信号频率不稳定:
- 对于
RMII接口,确保回给MAC的时钟信号频率在合理范围内。对于10M和100M的速率,时钟频率应为5Mhz和50Mhz;对于1000M的速率,时钟频率应为125Mhz。 - 对于
RGMII接口,时钟频率应为25Mhz(对应100M速率)或125Mhz(对应1000M速率)。 - 如果时钟频率不稳定,可能需要检查时钟信号的源头和信号线路,确保其稳定性和质量,可能需要重新布线或者使用更稳定的时钟源。
- 对于
一般情况下PHY不需要PHY驱动,走内核的通用驱动,但某些厂商的PHY需要特殊的PHY驱动支持,如果按照通用PHY的调试方法仍无法调通,请联系PHY厂商提供资料。
以太网PHY硬件排查方法
电源检查
- 电压检查:用万用表测试电压,需满足规格书要求。对于PHY,需要检查PHY的电源电压和IO供电,以RTL8211,为例,VDD与IO供电要求如下:

- 上电时序(示波器测量)、电压值(万用表测量)满足规格书要求。
- 上电波形检查:用示波器测试电源供电和IO供电的上电波形,核对是否存在电压过冲或跌落;若有电压波动,要求不能超过规格书的电压要求的范围,否则PHY可能工作异常;

- 上电时序检查:根据规格书,确定PHY的上电时序是否正常;
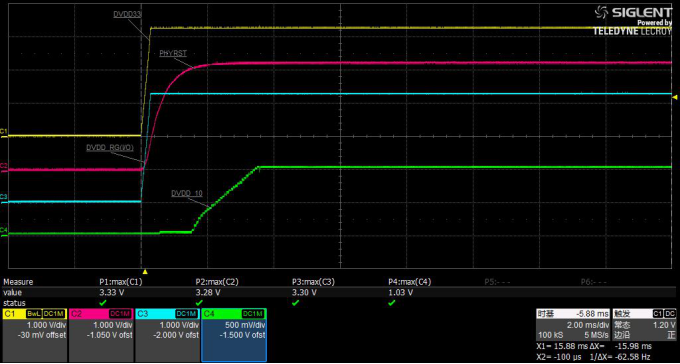
PHY 复位检查
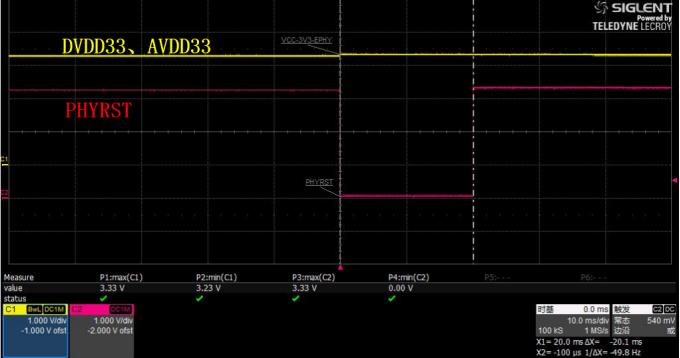
用示波器测试上电波形是否满足规格书要求的Reset时序,一般要求PHYRST拉低10ms。示波器测量实际波形如下,实测PHYRSTB低电平为20.1ms,满足时序要求:
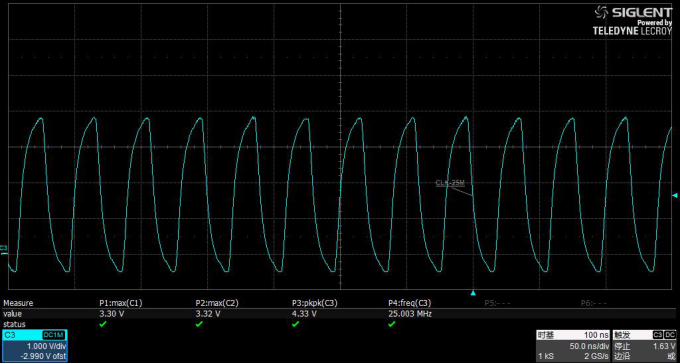
时钟检查
PHY的基准时钟一般由晶振或SOC 25M_CLK提供,用示波器测试信号是否存在,频率偏差是否过大:
外围电路配置
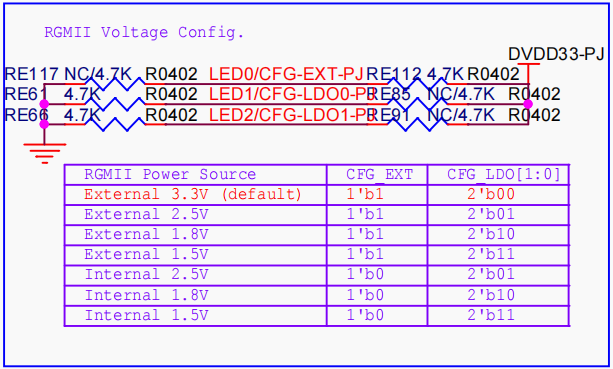
根据PHY规格书检查电路配置,如rtl8211,其兼容了RGMII和GMII两个模式,IO电压可以配置为3.3V、2.5V、1.8V、1.5V等,需要通过外围电路配置,若配置错误,可能引起工作异常;
- 信号检查:检查SOC端输出信号(RMII与RGMII)是否存在错接,少接的情况;
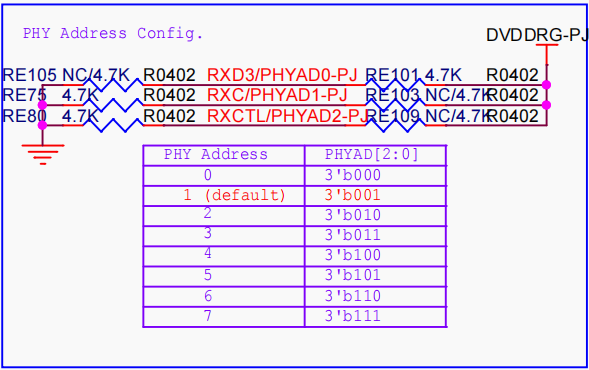
- PHY地址检查:确认是否与软件设定相匹配;
- 时钟配置以选择晶振输入或SOC 25M时钟输入;
- 其中使用PHY使用SOC时钟输入时,XTAL-IN引脚需要接GND;

- IO电压配置:要求SOC IO供电与PHY IO供电相匹配;
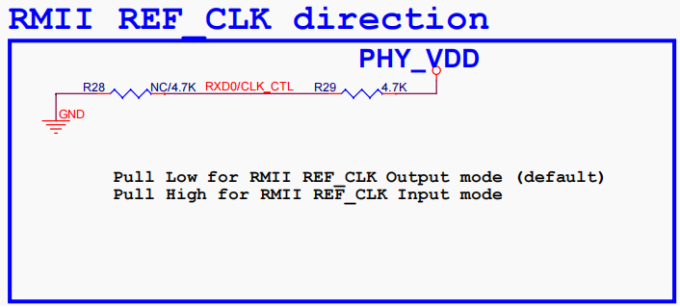
- 参考时钟配置:以RTL8201为例,REF_CLK 下拉,表示时钟输出;
- 模式配置:以RTL8201为例,可以配置RMII 或 MII两个2模式,SOC一般只支持RMII/RGMII两种,需要配置RMII/RGMII